
Политематический сетевой электронный научный журнал Кубанского государственного аграрного университета, 2005, №9
Покупка
Основная коллекция
Издательство:
Кубанский государственный аграрный университет
Наименование: Политематический сетевой электронный научный журнал Кубанского государственного аграрного университета
Год издания: 2005
Кол-во страниц: 155
Дополнительно
Вид издания:
Журнал
Артикул: 640542.0001.99
ББК:
УДК:
ГРНТИ:
Скопировать запись
Фрагмент текстового слоя документа размещен для индексирующих роботов.
Для полноценной работы с документом, пожалуйста, перейдите в
ридер.
УДК 631.371 ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ СРЕДСТВ ЭЛЕКТРОМЕХАНИЗАЦИИ ДЛЯ АПК Богатырев Н.И. – к. т. н. Кубанский государственный аграрный университет В технологическом процессе сельскохозяйственного производства преобладает сезонность работ, мобильность, территориальная рассредоточенность производственных объектов. Кроме общепринятых средств механизации требуется применение различного электрифицированного инструмента и средств малой механизации. В настоящее время широко используются проверенные временем стригальные и ягодоуборочные машины, чаесборочные и чаеподрезочные аппараты и другие средства электромеханизации. Развитие фермерских хозяйств предопределило разработку ряда новых электрифицированных машин для работы на мелкоконтурных участках, теплицах, садах и огородах: рыхлители ротационного типа, почвенные буры, культиваторы, сучкорезы, кормодробилки, электронасосы, индивидуальные доильные аппараты и т.п. В качестве электрического привода в них используются асинхронные или коллекторные машины на частоту тока 50, 200, 400 Гц с единичной мощностью от 0,1 до 4,0 кВт и различным напряжением питания [4]. Важнейшими требованиями к средствам электромеханизации, помимо высокой производительности, являются малая масса, небольшая стоимость и надежная работа. Здесь наиболее существенную роль играет приводной электродвигатель, на долю которого в серийно выпускающемся инструменте и средствах
механизации приходится от 30 до 75 % массы и от 50 до 80 % стоимости [5]. Электропривод известных средств электромеханизации изготавливается в основном на промышленную частоту тока, что, несомненно, повышает массогабаритные показатели. Для части устройств по обработке почвы это не является основным недостатком, так как масса инструмента способствует его заглублению в почву на требуемую глубину. Для остальной части электроинструмента снижение массы является актуальной задачей, так как находясь в руках оператора или будучи закрепленным на его теле, устройство может вызывать преждевременную усталость и снижение производительности труда. Практика показывает, что надежность работы инструмента во многом зависит от электродвигателя. Поэтому в нем следует искать те резервы, которые позволят улучшить качество механизма в целом. Наибольшей надежностью обладают асинхронные двигатели (АД), что является общепризнанным фактом. Масса, стоимость и эксплуатационные свойства АД зависят от диаметра статора D, его длины l и соотношения между ними. Именно они определяют размеры полюсов, внешний диаметр статора, размеры вала, подшипниковых щитов и т. д. Диаметр и длина АД, в свою очередь, зависят от мощности, частоты вращения (n, мин–1) и нагрузок, выбранных для магнитной системы, и определяются в основном магнитной индукцией Bδ в воздушном зазоре и линейной нагрузкой А, А/м. Величины А и Bδ зависят от мощности АД и от частоты его вращения. При увеличении мощности и быстроходности значения А и Bδ возрастают благодаря улучшению охлаждения. Мощность электродвигателя определяется: 5 2 10 cos 1,1 − ⋅ = ϕ η δ δnAB l D P , кВт, (1)
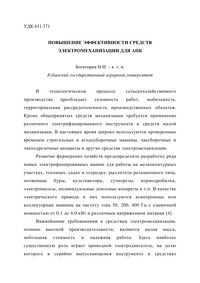
где D – наружный диаметр расточки статора, м; δl – длина воздушного зазора, м; n – частота вращения ротора, мин-1; А – линейная нагрузка статора, А/м; δ B – индукция в воздушном зазоре, Тл; η – КПД электродвигателя; ϕ cos – коэффициент мощности. Современные изоляционные материалы, повышение качества электротехнической стали, а также выбор более рационального соотношения между основными размерами АД позволяют уменьшить его размеры и массу. Дальнейшее снижение удельной массы электрической трансмиссии может быть достигнуто путем уменьшения массы двигателя за счет увеличения относительной скорости его вращения при повышенной частоте тока [6]. Зависимость массы электродвигателя (рис. 1) в функции мощности, частоты и числа полюсов, т. е. Gдв=F(P, f, 2p), аналитически может быть выражена одной из известных формул [4]: p f e f p AP Gдв 2 4 3 ) 2 ( β α α − − ⋅ ⋅ ⋅ = , (2) где Gдв – масса электродвигателя, кг; А – постоянный коэффициент, зависящий от исполнения АД; Р – мощность электродвигателя, кВт; 2р – число полюсов; f – частота сети, Гц; α = 1/3, β = 0,0096 – постоянные эмпирические коэффициенты.
а) б) Рисунок 1 – Масса электродвигателя: а) в функции мощности и частоты питающей сети при 2р = 1; б) в функции частоты вращения и числа полюсов при Р = 1 кВт При использовании электродвигателей повышенной частоты тока для привода рабочей машины или механизма увеличивается передаточное число, и возникает необходимость в установке
редуктора. При этом надо иметь в виду, что безредукторный привод для тихоходных машин более громоздок и тяжел, чем редукторный, и, как правило, неэкономичен. Это объясняется тем, что единица объема шестерни может передавать больший крутящий момент, чем единица объема ротора электродвигателя. Зависимости Mкр.дв. = f(D2l) и Mкр.ш. = f(D2l) приведены на рисунке 2. Здесь же дана зависимость крутящего момента червячной передачи от единицы объема червячного колеса [4]. Рисунок 2 – Зависимость вращающего момента от единицы объема ротора электродвигателя (Мдв.), шестерни (Мш.) и червячного колеса (Мч.) Отношение удельных моментов, приходящихся на единицу объема шестерни (при допустимой нагрузке σmax = 30 кг/м) и единицу объема ротора, составляет: 1 12 . . . . + = i i М M дв уд ш уд . (3) Например, при передаточном числе i, равном трем, это
отношение равно девяти; при σmax = 40 кг/м и большем значении передаточного числа это отношение возрастает. Из этих соотношений видно, что единица объема редуктора способна передавать во много раз больший крутящий момент, чем единица объема ротора электродвигателя. При этом характерны не только компактность и малая масса системы, состоящей из быстроходного электродвигателя и редуктора с большим передаточным числом, но и более низкая стоимость, так как единица объема и массы редуктора стоит значительно дешевле, чем единица объема ротора электродвигателя. Следовательно, зная зависимость массы электродвигателя от мощности и скорости вращения и определив массу редуктора по мощности и передаточному числу, можно найти наименьшую суммарную массу электродвигателя и редуктора для данной системы (рис. 3). Приближенная зависимость массы редуктора в функции мощности и передаточного числа Gред. = f(P,i) аналитически может быть выражена следующим образом:
Рисунок 3 – Зависимость массы электроинструмента от частоты питающего тока: GАД – масса электродвигателя; GРЕД – масса редуктора Gред.= aP+P⋅f(P)⋅i=aP+P⋅b⋅i, (4) где Gред. – масса редуктора, кг; а – постоянный коэффициент для данного класса редуктора; Р – мощность электродвигателя, приводящего в движение рабочую машину, кВт; i – передаточное число от электродвигателя к рабочей машине; b – коэффициент, учитывающий в основном массу самой передачи при определенном передаточном числе в зависимости от мощности электродвигателя, т. е. b = f(P) при i = const. Аналитическое выражение, устанавливающее зависимость массы системы, состоящей из электродвигателя и передаточного механизма (редуктора), как функции мощности электродвигателя и передаточного числа редуктора Gсист. = f(P, i), с учетом формул (2) и (4) запишется так: . . . . . . ред дв сист 5 4 . . 4 3 G G G м т дв т n дв т n n CP BP e n AP дв т + + = + = − − β α , (5) где nт.м. – частота вращения вала рабочей машины, тыс. мин–1. Из формулы следует, что существует оптимальная частота вращения, при которой масса системы будет наименьшей при заданной мощности. Определяется она через частную производную по этим величинам, так как масса системы зависит не только от частоты вращения ротора, но и от мощности электродвигателя:
,0 1 . . . . ) 1 ( . . . . 5 4 . 4 3 . 4 3 = + − − = ∂ ∂ − − − − + − − м т n дв т n дв т дв т сист n СP e n AP e n AP n G дв т дв т β α β α β α (6) где i n n дв т м т . . . = . Тогда ) ( 1 . . . . . . . . 20 1 β α β α + = − − дв т n дв т м т n Ае n P n дв т . (7) Для тихоходных (200–1000 об/мин) электрифицированных сельскохозяйственных машин и механизмов с точки зрения уменьшения массы системы наиболее подходят электродвигатели с частотой вращения 6000–12000 об/мин. Такие двигатели при частоте 200 Гц могут быть выполнены соответственно с двумя и с одной парой полюсов, а при 400 Гц – с четырьмя и с двумя парами полюсов. Конструктивное решение – высокоскоростной двигатель, редуктор, рабочий орган – заложено в вибраторе ягодоуборочной машины ЭЯМ-200 8 (рис. 4), в чаесборочных и чаеподрезочных аппаратах АЧР-300, РЧА-350, АШП-76 (рис. 5, 6) и других средствах электромеханизации [2, 6, 7]. Рисунок 4 – Вибратор электроягодоуборочной машины ЭЯМ-200-8
Рисунок 5 – Внешний вид аппарата РЧА-350 с асинхронным двигателем В приводе РЧА-350 используется АД типа А-200-105, а в приводе АШП-76 – АД типа АП-31-600/36. Параметры этих АД: мощность 105 и 600 Вт соответственно, номинальное напряжение 36 В, частота тока 200 Гц, частота вращения ротора (синхронная) 12000 мин-1. Для снижения повреждаемости плодов и уменьшения вибрации на руки оператора разработан вибратор (рис. 7) [1]. Рисунок 6 – Внешний вид аппарата АШП-76 с приводом от АД Конструктивно он содержит ручку 1 с выключателем 2, которая через амортизатор 3 соединена с корпусом 4, электродвигатель 5, червячную передачу с ведущей шестерней 6 и ведомых шестерен 7 с уравновешивающим противовесом 8 и вырезом 9. Ведомые шестерни 7 посредством шатунов 10 передают момент вилке 11 и стволу растения 12
через эластичное покрытие 13. В качестве привода используется АД мощностью 105 Вт на частоту тока 200 Гц. Рисунок 7 – Вибратор для встряхивания плодов С другой стороны, развитие электропривода средств электромеханизации происходит по пути сближения электрического двигателя и рабочего органа с вытеснением промежуточных передач. Оптимальный вариант такого сближения – полное слияние в единой конструкции приводного двигателя и рабочего органа. Предельно прост по конструкции электросекатор, разработанный на кафедре электрических машин и электропривода КубГАУ [6, 7] (рис. 8).